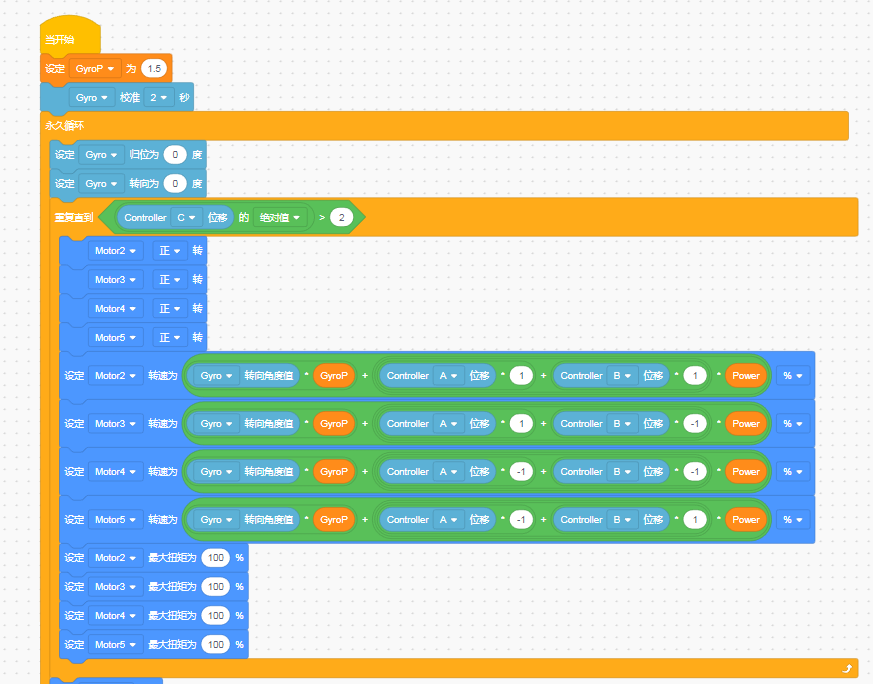
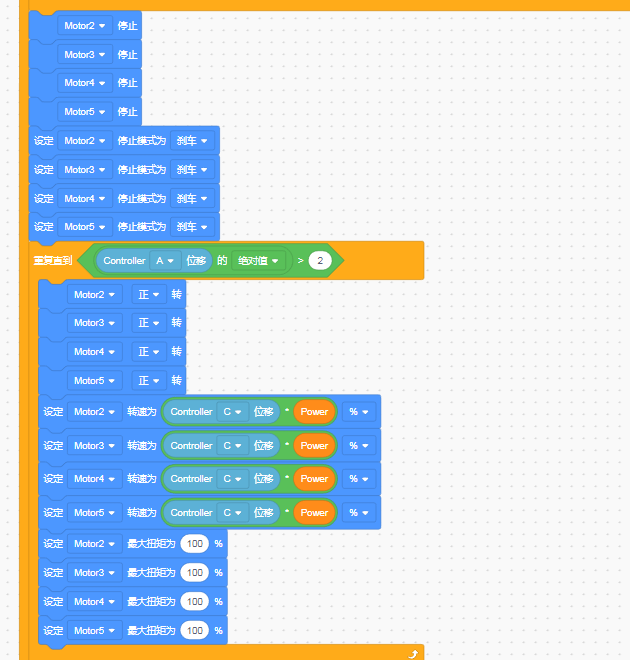
搭建的底盘四轮全向底盘,但是在编写程序的时候无论是前进后退还是左右平移,总是会漂。加了陀螺仪传感器也是如此,不知道是不是程序编写上出了问题,特来请教。已排除底盘搭建结构上的问题。
使用万向轮做底盘,因为轮子上的滚珠摩擦力比较小,在机器运动过程中,在惯性作用下确实会产生滑动,跟结构和程序没有关系,属于不可避免的因素。
确实,IQ电机和万向车轮结构是会这样,你可以试试把前面或者后面俩轮换胶轮试试
尝试下PID算法来矫正