陀螺仪的度数在静止状态下无规律增加,即便是校正后仍会保持增加。
请问是IQ的还是V5的陀螺仪?陀螺仪的因为检测频率很高,因此即使在静止状态下,数值也会有一定变化,这种现象称为漂移,因此需要进行校准操作,但是校准的目的是尽量减小漂移误差,而不是完全消除。
是IQ 陀螺仪,不稳定的时候可以在一秒钟内完成3-5度的度数变化。有什么方法可以校正或稳定下来吗?
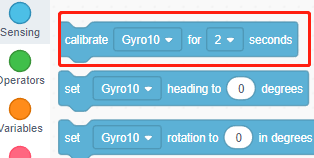
VEXcode IQ软件中有专门校准陀螺仪的指令,见下面截图:
IQ陀螺仪的校正是不是要经常进行?如果长时间不校正会不会使得偏差累积,而使得校正变得困难或者要重复操作校正?
如果是长时间不间断运行,确实会有偏差累积,此时如果想精准控制,需要重复进行校准。
确实如此。谢谢您啦!